
2010年408真题
1. 线索二叉树的结构定义和图示
求前中后线索二叉树的步骤:
- 求得前中后序遍历的序列
- 分配左右线索指针,left指向该节点序列的前一个元素,right指向该节点序列的后一个元素,首节点的left指针指向null
2. 树的结点数和叶子结点数计算
结点总数 = 分枝数 + 1(根结点) = 边数 + 1 = 1*度为1的结点个数 + 2*度为2的结点个数 + 3*度为3的结点个数.... + 1= 度为0的个数 + 度为1的个数 + 度为2的个数 + ...
20 * 4 + 10 * 3 + 1*2 + 10 *1 + 1= n0 + 10 + 1 + 10 + 20 => n0 = 82
3. 完全图的边数
- 有向图:n(n-1)/2
- 无向图:n(n-1)
4. 折半查找查找失败的最多比较次数
查找失败的最多比较次数 = 树的高度 (不是树的高度+1 这里是比较次数) 折半查找判定树的特点:
- 平衡性:是一个完全平衡二叉树
- 深度: log2n + 1
- 查找路径的判定
5. 快速排序的递归次数与什么有关?
- 与序列的初始排列有关
- 与分区的处理顺序无关
6. 补码乘法运算溢出判断
共2w位 前w为全0或者全1不溢出,否则溢出
同号相乘得到正数,判断前N位是否为全0 否则溢出
异号相乘得到负数,判断前N位是否位1,否则溢出
也可将补码转换为十进制数 计算乘法 判断该数是否在补码的表示范围内
7. c语言中的类型转换
表示范围: int < float < double
int->float 存在精度丢失 不会溢出
float->int 存在溢出 不会精度丢失
int—>double 均不会
float->double 均不会
8. RAM和ROM
- RAM是易失性存储器,所以需要刷新,ROM是非易失型存储器,不需要刷新
- RAM和ROM都可采用随机存取方式访问
- RAM速度 > ROM
- RAM可用于高速缓存
9. 程序员可见的寄存器
可见寄存器:通用寄存器组(基址和变址)、程序状态字寄存器PSW、程序计数器PC、累加寄存器ACC、栈指针SP、移位寄存器
不可见:指令寄存器IR、暂存寄存器DR、MAR、MDR
PSW中包含状态标志(CF、ZF、OF、SF)和控制标志(中断允许标志、陷阱),转移指令依赖状态标志,故程序员可见
CPU内部的寄存器有哪些?
运算器:ALU、暂存寄存器、累加寄存器、通用寄存器组、PSW、移位寄存器、
控制器:PC、指令寄存器、指令译码器、MAR、MDR和时序逻辑
10. 造成指令流水线阻塞(冒险)的原因有哪些?
数据冒险(数据相关)、结构冒险(资源冲突)、控制冒险(条件转移)、
解决方案:插入空操作指令、暂停一个时钟周期、采用数据旁路(转发)
11. 中断的过程
单中断:
关中断-> 保存断点(PC和PSW) -> 中断服务程序寻址 -> 保存现场 -> 执行中断服务程序 -> 恢复现场 -> 开中断 -> 中断返回
中断隐指令: 关中断-> 保存断点(PC和PSW) -> 中断服务程序寻址
中断服务程序: 保存现场 -> 执行中断服务程序 -> 恢复现场 -> 开中断 -> 中断返回
多重中断:
1️⃣ 关中断。
2️⃣ 保存断点(PC和PSW)。
3️⃣ 中断服务程序寻址。
4️⃣ 保存现场和屏蔽字。进入中断服务程序后首先要保存现场和中断屏蔽字,现场信息是指用户可见的工作寄存器的内容,它存放程序执行到断点处的现行值。
现场和断点,这两类信息都不能被中断服务程序破坏。由于现场信息用指令可直接访问, 因此通常在中断服务程序中通过指令把它们保存到栈中,即由软件实现 。而断点信息由 CPU 在中断响应时自动保存到栈或指定的寄存器中,即由硬件实现。
5️⃣ 开中断。允许更高级中断请求得到响应,以实现中断嵌套。
6️⃣ 执行中断服务程序。这是中断请求的目的。
7️⃣ 关中断。保证在恢复现场和屏蔽字时不被中断。
8️⃣ 恢复现场和屏蔽字。将现场和屏蔽字恢复到原来的状态。
9️⃣ 开中断、中断返回。中断服务程序的最后一条指令通常是一条中断返回指令,使其返回到原程序的断点处,以便 继续执行原程序。
1~3 由中断隐指令(硬件自动)完成: 4~ 9 由中断服务程序完成。
11. 操作系统给应用程序提供哪些?
系统调用
12. peterson算法(‼️)
!!!
单标志法:交替进入临界区 需要由另外一个进程唤醒 若该进程不再进入临界区 则另一个也无法进入 违背空闲让进
双标志先检查:违背忙则等待
双标志后检查:违背空闲让进,会出现饥饿现象 违背有限等待
peterson算法:综合1和3的算法思想,使用flag[]解决互斥访问问题,利用turn解决饥饿问题 ,未遵循让权等待
硬件实现:
中断屏蔽方法 使用关中断 临界区 开中断
硬件指令 TestAndSet指令 使用ts给资源上锁 结束后 解锁
硬件指令 Swap
未遵循让权等待,会导致饥饿现象
互斥锁:使用硬件实现,存在忙等现象
信号量:PV操作
整型信号量 未遵循让权等待
记录型信号量 使用链表存储等待资源的进程 解决让权等待
13. 最佳适应&动态分区分配算法
首次适应:按地址递增次序排列,顺序找第一个满足大小(性能最好)
邻近适应(循环首次适应):从上次结束的位置继续往下查找
最佳适应:按照容量递增 顺序找到第一个满足大小 产生很多外部碎片
最坏适应:按照容量递减排列,找第一个最大
14. 存储转发流水线
流水线传输时延 = k段链路的传输时间 + 前n-1个分组的发送时延 + 最后一个分组在k段链路中的发送时延
= k段链路的传播时延 + k个流水段 * 单个流水段时间r + (分组个数 - 1) * 单个流水段时间r = kd + kr + (m-1)*r
15. ICMP报文的类型
ICMP差错报告报文:终点不可达、源点抑制、时间超过、参数问题、路由重定向
不发送差错报告报文的情况:
ICMP询问报文::回送请求和回答报文、时间戳请求和回答报文、地址掩码请求 和回答报文、路由器询问和通告报文
ICMP的两个常见应用是分组网间探测PING(用来测试两台主机之间的连通性)和Traceroute(UNIX中的名字,在Windows中是Tracert,可以用来跟踪分组经过的路由)。其中PING使用了ICMP回送请求和回答报文,Traceroute(Tracert)使用了ICMP时间超过报文
16. DNS解析发送请求数分析
主机->本地域名 递归
本地域名-> 其他域名服务器 可采用递归和迭代,递归只需发送DNS请求一次,迭代需要发送多次
17. 索引文件最大文件长度计算
先确定磁盘索引块的大小、磁盘数据块的大小、索引项的大小、再确定索引文件中直接索引项的个数、一级间接索引的个数、二级间接索引的个数
例如:直接索引4个、一级2个、二级1个,索引项占4B,磁盘索引块和磁盘数据块均为256B。
4*256 + 256/4 * 2 *256 + 256/4 * *256/4 * 256
18. RIP、OSPF、BGP
内部网关协议:RIP、OSPF
外部网关协议:BGP
RIP
- 距离矢量路由协议,基于跳数,最大跳数为15
- 每隔30S广播路由表中的所有条目,仅与直连的路由器交换信息
- 好消息传的快,坏消息传的慢(慢收敛)
- 因为需要频繁的广播交换信息,故采用UDP协议,端口号为520
OSPF
- 链路状态路由协议。居于洪泛法,交换的是域内全部的路由信息
- 发送的消息是与本路由器相联的所有的链路状态
- 基于IP
BGP
- 基于TCP
- 与本结点相邻的路由器交换信息,首次交换整个路由表,非首次交换有变化的部分
19. 散列表
1️⃣ 确定表长(一般可由装填因子得出或者题目直接给出)
2️⃣ 确定散列函数,常见的散列函数有直接定址法:y=kx+b,除留余数法h = key/p
3️⃣ 确定解决冲突的方法:
开放地址法(在散列函数的基础上增加增量d):(h(key) + d)/p,d可线性增加,也可平方增加,或者增量由第二个散列函数得到
拉链法:将冲突的同义词使用一个链表存储
4️⃣ 查找成功的平均查找长度计算 = 序列中各元素查找成功的次数之和 / 关键字个数
查找失败 = (0~p-1)查找失败次数之和 / 质数p(要模以的数字)
关键字序列{7,8,30,11,18,9,14}散列存储到散列表中,散列表的存储空间从0开始的一维数组,散列函数H(key)=(key*3)mod7,处理冲突采用线性探测再散列,装填因子为0.7,使用md画出所构造的散列表,计算等概率情况下查找成功和查找失败的平均查找长度
+---+---+---+---+---+---+---+---+---+---+ | 7 |14| | 8 | |11|30 |18 | 9 | | +---+---+---+---+---+---+---+---+---+---+ 0 1 2 3 4 5 6 7 8 9
查找成功 = (1 + 2 + 1 + 1 + 1 + 3 + 3) / 7 = 12/7
查找失败 = (3 + 2 + 1 + 2 + 1 + 5 + 4)/7 = 18/7
20. 指令格式分析和执行
指令格式:op 寻址特征1 操作数1 寻址特征2 操作数2
指令系统的指令数由操作码OP字段确定2^op
通用寄存器的位数由寄存器寻址操作数的位数确定2^r
MAR的位数:主存地址空间大小M和编制方式字节or字 MB/rB
MDR的位数:等于指令的字长(单字长指令&双字长指令)
转移指令的寻址范围:
- 相对寻址常规情况下 (PC) + 1 + 偏移量(补码 表示范围-2^n-1 ~ 2^n-1 - 1)
加法指令 是将源操作数和目的操作相加 写回到目的操作数地址中 分清楚(R1) 和 R1的区别
21. cache数组各项物理地址的寻址过程
cache映射方式:
直接映射 标记 行号 块内地址
全相联:标记 块内
组相联:标记 组号 块内
cache容量计算:标记位 + 有效位 + 替换位 + 一致位 + 数据
cache访问命中率计算 = 1 - 缺失率
缺失率计算 = 缺失次数 / 访问总次数(注意读写次数需要x2)
缺失次数分析:设cache行大小为64B,一个int数据占4B,数组A[256][256],故一个cache行可存储16个int数据,每16个缺失一次,共访问2^16次,缺失次数 = 2^16 / 16
数组首地址320(十进制)分析:
- 每16个一组 320 / 16 = 5,初始行在5行
- 320转为16进制 320 + 31x4
22. 磁盘
管理空闲磁盘盘:
- 空闲表法(顺序存储),空闲盘块表的内容,第一个空闲盘块表,空闲盘块数
- 空闲链表法,盘块链和盘区链,盘区是将多个盘块合并为一个盘区
- 位示图,用二进制的一位表示一个盘块
- 成组链接法,空闲表和空闲链表不是大文件系统,将空闲盘块分组,记录每组的第一个盘块号和盘块数,组成链表
磁盘调度算法
先来先服务算法
最短寻道时间优先算法
SCAN算法(类似于电梯算法):确定当前磁头的位置,磁头移动的方向,一次访问从磁头的位置到最大磁头位置间的请求,然后调转磁头移动方向,重复上述过程。
C-SCAN算法:类似于SCAN算法,只是在到达最大磁头位置时,会回到起始位置0,继续扫描,消除两端访问
C-LOOK算法:不用到达最大磁头位置,而是当前访问的最大磁头位置后再逆转方向。
注意SCAN和C-SCAN都需要访问到磁道的最外层,而不是达到最大磁道请求后返回,C-LOOK与之相反,不需要到达最外层而是到达最大磁道请求后返回
针对最大磁道数请求和最外层问题,真题中若出现了最外层即加入运算,若没出现则不考虑,默认达到最大磁道最大请求后返回
磁盘读数据所花时间 = 寻道时间 + 旋转时间 + 传输时间
寻道时间 = 启动磁头臂t + 常数k*移动磁道数
旋转时间:
- 把扇区移动到磁头的下方(只和硬件有关)
- 平均旋转延迟 = 1/2 * 转数每秒
传输时间 = 所需要读写的字节数 / 每秒转数 * 每扇区的字节数
- 如果题目中给出的是读取一个扇区所需要的时间 = 磁盘转一圈的时间 / 一圈的扇区数
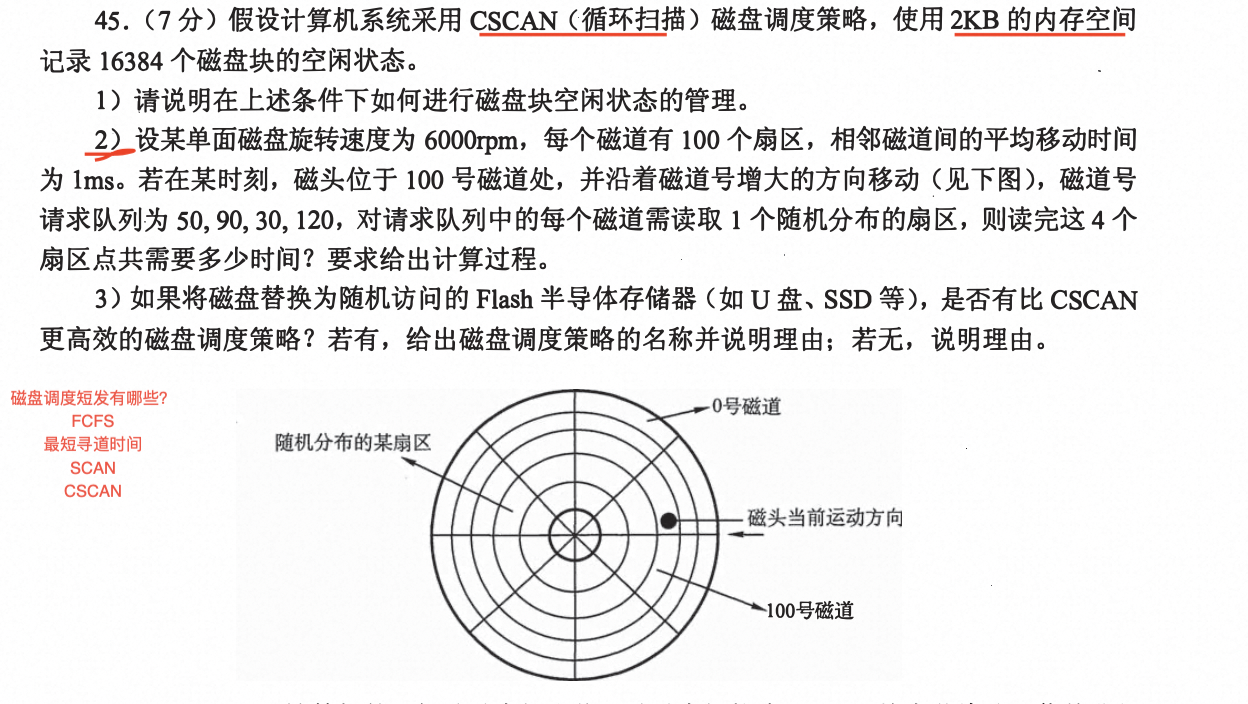
(1) 由题可知,可使用2KB内存空间使用位示图管理磁盘块状态,2KB = 2^14b = 16384b
(2) 使用C-SCAN调度算法,题目为给出最大磁头位置,故到达最大请求位置后返回,以此访问120、30、50、90,共移动170个磁道数。
寻道时间 = 170 * 1ms = 170ms
盘面转一圈的时间为:60S*1000/6000=10ms(1s = 1000ms)
平均旋转延迟 = 10 / 2= 5ms
旋转时间 = 平均旋转延迟5ms * 读取4个盘片(旋转4次) = 20ms
读取一个扇区 = 转一圈的时间 / 100个扇区 = 10ms / 100 = 0.1ms
传输时间 = 读取一个扇区 * 4 = 0.4ms
总时间 = 寻道时间 + 旋转时间 + 传输时间 = 170ms + 20ms + 0.4ms = 190.4ms
(3) 采用FCFS调度策略更高效,因为Flash半导体随机存储器的物理结构不需要考虑寻道时间和旋转时间,可直接利用IO请求序列调度23. 页面替换算法
最久不使用算法(最佳置换算法OPT):换出以后都不会使用的页面或者以后最久不使用的页面,根据集合向后看
先进先出(FIFO):各个页面置换算法运行过程,按照先进先出策略进行,替换时,淘汰集合的第一个(队列的第一个) 会出现Belady现象 增大集合 缺页次数不减反增
最近最久未使用(LRU):根据各页使用的集合向前看,
时钟Clock算法:首次装入或访问 访问位为1,替换时选择0淘汰,并指向淘汰页的下一页
改进时钟clocl: 访问位0 修改位1 优先级 00、01、10、11
先选00 再找01(同时修改访问位为0)
24. CSMA/CD
冲突最长时间 争用期 = 2 * t = RTT
冲突最短时间 = 单向传播时延
最短帧 = RTT * 数据传输速率
2进制指数规避算法 [0,...,2^k - 1], k = min[重传次数,10]
有效数据传输速率 = 发送数据 / 发送时延+ RTT + 确认时延